Meets on Thursdays Fall 2011 and Spring 2012 to continue with the 6 projects.
16:714:521:01. Index 35830
This will be a hands-on course on human movement and movement coordination in real-world 3D situations.
It will cover the basics of movement kinematics, graphing of three dimensional movement data using Matlab, aspects of the rotation group used to parameterize angular rotations of the multiple joints of the body, and movement coordination patterns.
The class will alternate lectures with sessions of actual data recordings and analysis to address some experimental hypothesis about movement control in some experimental context to be determined by the class.
Everything will be learned and implemented in class, including various statistical analysis of multivariate data.
The aim is to write a paper and culminate the class with the submission of a manuscript reporting the methods and results from the class for each of the proposed projects.
This Lectures cover the various prameterizations of the rotations starting from the two-dimensional cases, scaling up to three dimensions.
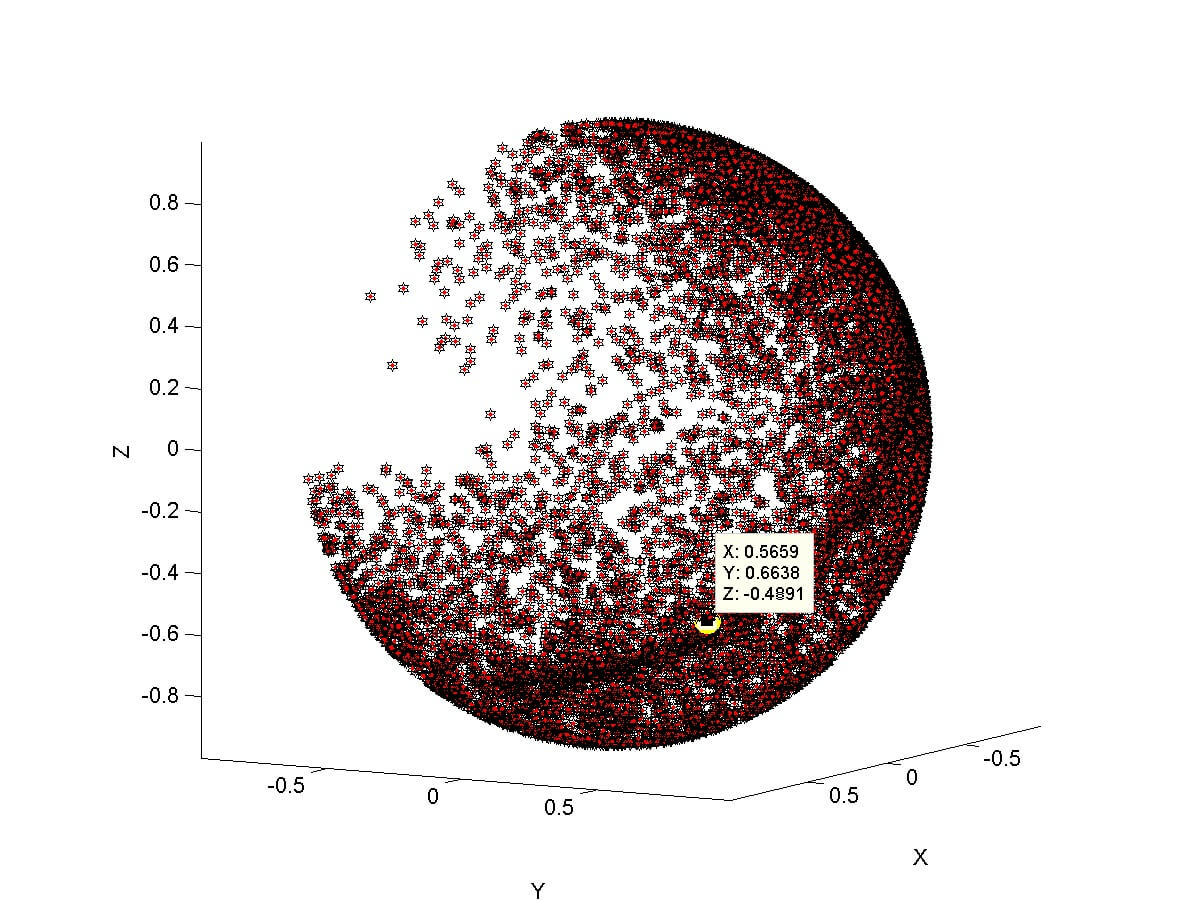
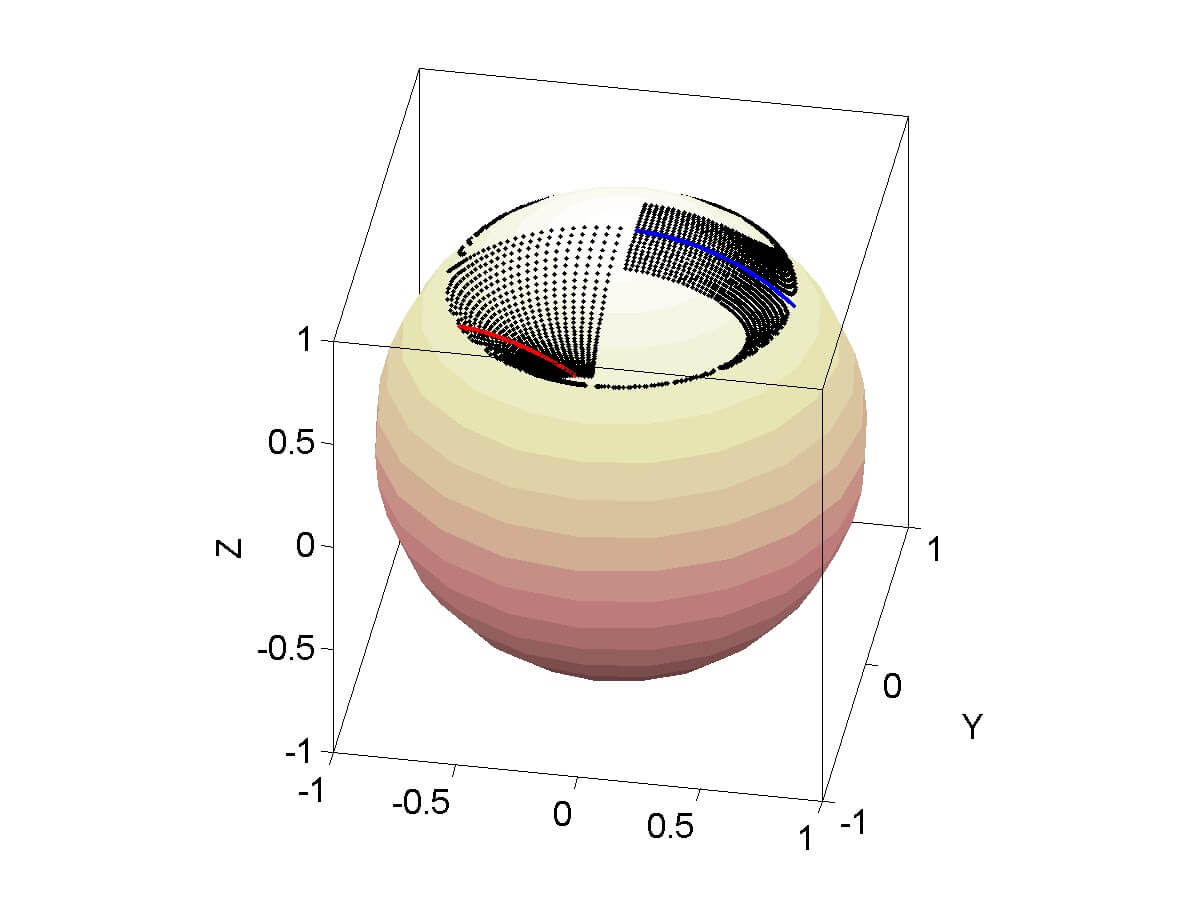
This video shows the helical axes to measure relative rotations across the various limbs during the martial arts exercises in class. Notice the slow motion part where the axes unfold nicely.
Here we recorded a student during an obstacle avoidance task where we study the balance between approach avoidance behaviors and their deliberate planning-execution cycles vs the unintended aspects of the loop, then we go over the Euler angles, the angle-vector and the Rodrigues Programme, then we delve into the Quaternions in the weeks 7-11 before we start the projects.
Here is our expert in the dark wearing glowing sticks in front of a mirror
Here is the expert performing the serve and in the back the rendering of her digitized body in three dimensions by the Motion Monitor
The Tennis Serve
Here we have the expert performing the tennis serve with the left hand to place her at a “novice” state
Here we have the expert performing the tennis serve in complete darkness with the right (dominant hand)
The team: Polina, Gwen, Min Zhao, Lillian, Gina and Liz
Two sets of experiments: Movement Execution – Kinesthetic sensing of movement and Movement Observation – Visual sensing of movement
Conditions: Vary speed to assess the differences between deliberate-intended and automatic-unintended during learning
Kinesthetic Sensing Case: We will learn the tennis serve from Gina, the expert under various conditions:
(1) light -imitation simultaneously with Gina
(2) light – simulation from memory of Gina’s serve
(3) light -simulation from memory in front of a mirror
(4) dark – simulation from memory with eyes closed in the dark
(5) dark with glowing sticks in front of the mirror
Visual Sensing Case: Polina will build the stimuli from the recordings using Poser. We will distort the statistics of the motions and assess to what extent we stop recognizing our own motions and the motions of others under the perturbations.
Project 2
Virtual vs. Real Boxing
The team: Elio, Nick, Aaron and David
An expert will train each novice to perform boxing routines (jab and cross) virtually to hit an imaginary opponent and actually hitting a boxing pad.
Two speed levels are used and the main question is whether the speed profiles of the hands reveal fundamental differences between the virtual and real cases.